RUBRIK BONN, DEINE LEHRENDEN Prof. Dr. Maren Bennewitz ist die Herrscherin der humanoiden Roboter – zumindest im Institut für Informatik VI. Im AKUT-Gespräch verrät die zweifache Mutter, wie die menschenartigen Maschinen auch im Kinderzimmer helfen können.
INTERVIEW ALEXANDER GRANTL

Prof. Maren Bennewitz: »Die Naos sehen einfach süß aus« (Foto: Alexander Grantl / AKUT)
AKUT Sie sind seit 2014 an der Universität Bonn Professorin für Humanoide Roboter. Vorher waren Sie 6 Jahre Juniorprofessorin in Freiburg. Welche Uni ist robotermäßig vorne?
BENNEWITZ Das kann man so natürlich gar nicht beantworten. (lacht) Freiburg hat jedenfalls eine sehr große Robotikgruppe – dort gibt’s definitiv mehr Doktoranden und Forschende, die sich mit diesem Thema beschäftigen. Allerdings haben wir in Bonn mittlerweile auch drei Robotikgruppen: Eine, die sich mit autonomen intelligenten Systemen befasst; meine Gruppe, die viel mit humanoiden Robotern arbeitet und eine Gruppe im Institut für Geodäsie, die sich neben Luftbildmessungen auch etwa mit Outdoorrobotik beschäftigt. Es gibt in Bonn also drei starke Gruppen, doch im direkten Vergleich liegt sicher Freiburg vorne. Aber wir holen auf.
AKUT Was fasziniert Sie an humanoiden Robotern?
BENNEWITZ Zunächst einmal sehen die Naos, mit denen wir arbeiten, einfach süß aus. Viele Menschen können sich dadurch schnell mit ihnen emotional anfreunden. Wir arbeiten aber auch noch mit anderen Robotern, etwa Plattformen, die Räder haben. Die sind natürlich nicht ganz so niedlich. Warum mich Robotik fasziniert? Weil man in der Robotik sofort sieht, ob ein Algorithmus funktioniert oder nicht. Man überlegt sich erst eine Problemstellung, dann implementiert man eine Lösung und probiert das Programm direkt aus. Das kann man teilweise auch in Simulation machen, aber wenn man es mit dem Roboter ausprobiert, weiß man sofort, ob das System robust ist oder nicht. Leider ist es das sehr oft nicht direkt der Fall, sodass man das System weiterentwickeln muss. Aber genau das finde ich spannend, weil man nie auf Anhieb weiß, wie ein System sich in allen möglichen Situationen verhält. Anders, als in anderen Gebieten der Informatik, die beispielsweise Algorithmen entwickeln, um Datenbanken zu durchforsten.
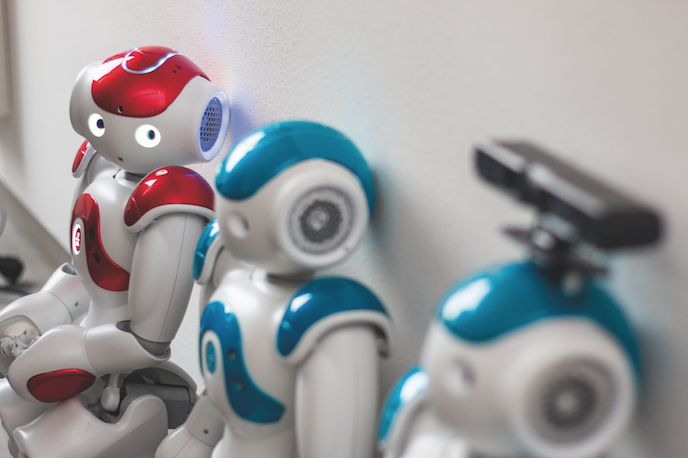
Humanoider Roboter Nao (Foto: Alexander Grantl / AKUT)
AKUT Warum sollten Roboter überhaupt humanoid sein?
BENNEWITZ Die Idee dahinter war, dass menschenartige Roboter von echten Menschen eher akzeptiert werden, als eine Maschine, die nicht menschlich aussieht. Natürlich ist das eine Gratwanderung, denn sehen die Maschinen zu menschlich aus, erwartet man viel eher, dass sie auch intelligente Dinge tun. Natürlich aber hilft ihnen die Menschenähnlichkeit auch dabei, sich in für Menschen gedachten Umgebungen zu bewegen: Beine zum Treppensteigen, Arme zum Greifen und Halten.
AKUT Gibt es eine Grenze zur »Menschenähnlichkeit«, die man nicht überschreiten sollte?
BENNEWITZ Man sollte in jedem Fall erkennen können, ob es ein Mensch oder eine Maschine ist. Besonders in Japan gibt es Forscher, die sich hauptsächlich auf die Hardware beschränken. Die haben dann sehr menschlich aussehende Systeme, die sich aber gar nicht so menschlich verhalten. Das finde ich wirklich nicht schön und das ist auch nicht unser Ziel. Unsere Systeme sollen sich intelligent verhalten, wir fokussieren uns auf die Software. Der Nao-Roboter, den wir nutzen, ist eine Standardplattform eines französischen Herstellers. Zudem gibt es die These des »Tals der Ähnlichkeit«, nach welcher zu menschliche Maschinen eher beängstigend auf Menschen wirken. Wo genau diese Grenze liegt, ist aber schwer zu sagen.
AKUT Ihre Roboter können Treppensteigen, auch Wendeltreppen, Dinge greifen, tragen, Schere-Stein-Papier spielen – was noch?
BENNEWITZ Na, das ist doch schon eine ganze Menge! In einem aktuellen Projekt arbeiten wir mit einer Plattform, die Räder und einen Greifarm hat – die soll beim Aufräumen von Kinderzimmern helfen. Einer meiner Doktoranden versucht, dass der Roboter dabei mit den Kindern interagiert. Wichtig ist, dass der Roboter den Kindern nicht alles abnimmt, sondern spielerisch mit ihnen umgeht: Etwa können die Kinder dem System beibringen, an welche Stelle die Spielsachen gehören. Dann räumen sie in Zusammenarbeit auf. Bei diesem Projekt haben wir uns zwar erstmal auf Kinderzimmer und Kindertagesstätten konzentriert – die gleichen Methoden ließen sich aber auch zum Aufräumen von Hotelzimmern anwenden.
AKUT Und diese Problemstellungen kommen direkt aus dem »echten Leben«…?
BENNEWITZ Ja. Zumindest konnte jeder, dem ich von diesem Projekt erzählte, sofort etwas mit dem Problem anfangen. Tatsächlich entstand diese Idee aber zwischen Kollegen, die keine kleinen Kinder mehr hatten.

(Foto: Alexander Grantl / AKUT)
AKUT Inwiefern können Ihre Roboter eigentlich selbstständig lernen?
BENNEWITZ Bis zu einem gewissen Schwierigkeitsgrad können sie Vorgänge schon lernen, aber vieles muss noch vorgegeben werden. Ein Beispiel: Der Roboter steht im Türrahmen und soll ein Objekt mitten im Raum greifen. Er bekommt nicht den Befehl »ein Schritt nach vorne, noch ein Schritt nach vorne, ein Schritt nach rechts, …« – sondern man gibt die Zielposition des Objekts vor. Die Bewegungen zum Objekt hin plant er dann selbstständig. Ist das Objekt aber sehr schwer oder schwierig zu greifen, ist er auf Hilfe angewiesen. Allerdings wird es wohl nie eine Maschine geben, die allgemein irgendwelche Dinge lernt und sich selbst immer weiter verbessert.
AKUT Sie gehen davon aus, dass Roboter, die Endverbraucher im Alltag unterstützen, in ein paar Jahren marktreif sind. Wem werden die alles nützen?
BENNEWITZ Nun, Staubsaug- und Rasenmähroboter gibt es schon. Das sind allerdings auch Systeme, bei welchen keine Interaktion notwendig ist. Die erledigen ihre Aufgabe: saugen, wischen, mähen – Autofahren können sie auch schon. Den persönlichen Haushaltsassistenten, der Tische ab- und Geschirrspüler einräumt, wird es aber erst in etwa 20 Jahren geben. Es dauert, bis er so dynamisch und robust ist, um in diesen Umgebungen zu funktionieren.
AKUT Sie sind zudem eine von fünf Prorektorinnen und Prorektoren der Uni Bonn, Ihr Ressort ist Informationstechnologie und Wissenstransfer. Was bedeutet das konkret? Und wie unterstützen Sie die humanoiden Roboter dabei?
BENNEWITZ Die können dabei leider gar nicht helfen! Aber meine vier Kollegen und ich treffen uns wöchentlich mit dem Rektor und dem Kanzler – da besprechen wir alle möglichen Themen: Anträge zum Schaffen oder Verlängern von Stellen, Berufungen, Liegenschaften… Es ist sehr kollegial und die Arbeit macht Spaß. Ich bin für das Ressort Informationstechnologie und Wissenstransfer zuständig. Da geht es darum, die IT-Infrastruktur der gesamten Uni Bonn weiter zu entwickeln und wettbewerbsfähig zu halten. Vor allem für die Mitarbeiter und die Verwaltung. Es soll eine Infrastruktur sein, in denen sie effizient arbeiten können. Im Bereich »Wissenstransfer« halten wir Kontakt zu Unternehmen und Institutionen in der Umgebung – denn die Erkenntnisse unserer Forschung sollen ja irgendwann zu marktreifen Produkten werden.
AKUT Noch ein Wort zum Abschluss, bitte.
BENNEWITZ Seit ich als Professorin an der Uni Bonn bin, wo ich Informatik studiert habe, hat sich für mich ein Kreis geschlossen. Ich bin sehr froh, wieder im Rheinland zu sein. Die Mentalität hier ist einfach einzigartig und die Uni Bonn verkörpert ein tolles Zusammengehörigkeitsgefühl. ◄